Animals as Inspiration
Your task … is to build a robot that can dig through dirt and rubble, to help in disaster scenarios — like after an earthquake, when it’s too dangerous to send in people. To do this, you will use biomimicry — the study of nature to inspire design. Some animals have body parts that help them dig efficiently. You are going to learn about four animals that are well adapted for digging. Then you will design a robot that is inspired by the body parts that help the animal dig.
In most middle schools, learning is segregated by discipline—science in one class, and engineering or computing in another. Yet recent trends in science and engineering education suggest this approach is outdated. Students need to use skills and practices from multiple subject areas to solve problems. Designing Biomimetic Robots is a curriculum designed to support middle school students in thinking across biology, engineering, and robotics, providing the foundation for an innovative approach to interdisciplinary education.
Developed by researchers at TERC and Tufts University’s Center for Engineering Education and Outreach (CEEO) and funded by the National Science Foundation (#1742127), the Designing Biomimetic Robots curriculum challenges middle school students to learn about biomimicry by interweaving engineering, biology, robotics, and computer programming concepts through a series of engaging, practical, and fun tasks.

The Designing Biomimetic Robots curriculum is designed to engage middle school students in using ideas from animal structure and function to build a biomimetic robot. In this course of study, students will study the natural world to learn how animals accomplish different tasks, then design and build a robot inspired by what they learned. In the process, students will have an opportunity to practice computational thinking, scientific reasoning, and engineering design skills, and learn how to build and program a robot.
Interdisciplinary learning
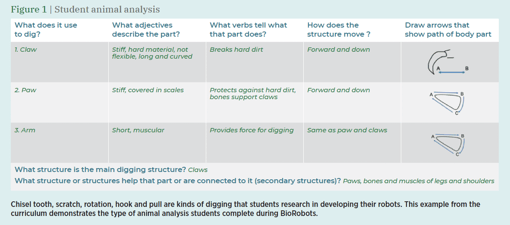
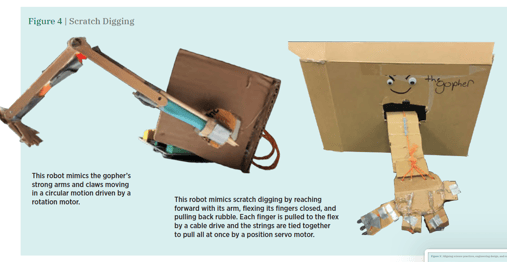
The curriculum, revised over multiple iterations (Bernstein et al., in press) asks students to design a search and rescue robot adapted for digging as part of potential recovery efforts in the event of a disaster. Students begin by studying the internal and external structures of four animals well adapted to digging in different ways: pangolins (hook and pull diggers), gophers (scratch diggers), mole rats (chisel tooth diggers), and moles (humeral rotation diggers). Based on their biology research, students then choose an animal to mimic. The instructional materials guide them through the process of studying animal structures and functions, and then designing and building a digging robot that reflects what they learned about their digging animal. Included templates, prompts and other scaffolding materials carry student teams through the steps of framing the problem, decomposing the structures and functions that help animals dig, and abstracting that understanding to inspire their robot design. Students then spend several sessions making that design a reality through multiple rounds of building, testing, and documenting their findings to refine and improve upon their final product.
The curriculum includes approximately 15 hours of classroom activities as well as building guides, links to multimedia resources, printable student worksheets, lists of materials needed, and teacher tips throughout. An introduction for the teacher discusses problem-based learning; suggested instructional approaches, including formative evaluation; and information on alignment with the Next Generation Science Standards. Lesson plans support student engagement in disciplinary practices such as developing and using models, generating design solutions, abstraction and decomposition.
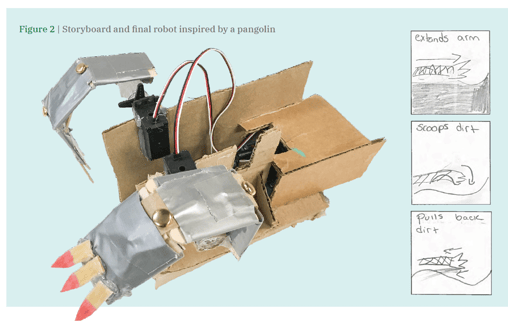
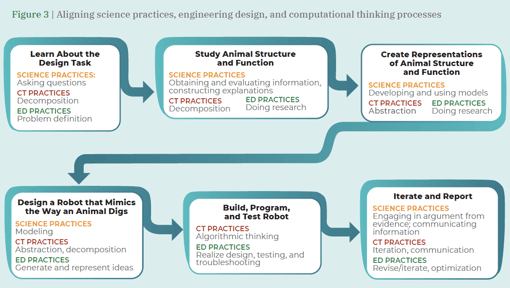
Figure 3 aligns the science practices, engineering design (ED) practices, and computational thinking (CT) practices with the main activities that students participate in during the curriculum.
Research
The project’s goal was to create and research an integrated learning experience that incorporated biology, engineering, and computing. Research on the curriculum’s effectiveness was guided by one overarching question: How does the Designing Biomimetic Robots learning environment support student engagement in interdisciplinary learning?
The research team from TERC and Tufts piloted the curriculum in classrooms across multiple states, in urban and suburban school districts with diverse student demographics. Over three years, 22 middle school teachers and nearly 800 students participated in piloting the curriculum. Science, engineering, and technology teachers participating in the pilot program completed professional development before implementing the curriculum and suggested valuable improvements to shape the curriculum further.
During this pilot period, researchers collected student-based evidence, using a case-study approach to assess the effectiveness of Designing Biomimetic Robots at meeting its learning objectives. A pre-post assessment showed that the curriculum helped students improve knowledge, practices, and skills in engineering, science, and computational thinking. In interviews, students were readily able to describe the ways in which their robots were and were not biomimetic (i.e., mapping animal structure/function analysis to robot design), provide a rationale for the design choices they made, and describe the iterations in their engineering design process.
The activities in the BioRobots curriculum provided students with new ways to encounter, apply, and express their disciplinary knowledge (Shaw et al., 2020). Designing Biomimetic Robots provides an easily deliverable structure to bring robotics construction activities into science and engineering courses and makes this type of study more accessible for students with a broad range of academic experiences.
How to access the curriculum
Visit terc.edu/biorobots to download the curriculum, resources, and a one-hour activity.
Acknowledgements
This material is based upon work supported by the National Science Foundation under Grant Number 1742127. Any opinions, findings, conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
The BioRobots team is grateful to the teachers and students who participated in the project. We thank the teachers for their collaboration, and the students for designing and creating these robots.
Project Team
Debra Bernstein, Ph.D., is a Senior Researcher in the STEM Education Evaluation Center (SEEC) at TERC, a non-profit research and development organization. Her research interests include curriculum design, implementation, and learning opportunities arising from the integration of technology design activities into K-12 and informal learning settings.
Michael Cassidy, Ph.D., is a Senior Researcher at TERC. His work focuses on teacher professional learning, computational thinking, engineering education, robotics, and evaluation of mathematics and science intervention programs.
Ethan Danahy, Ph.D., is a Research Associate Professor at the Center for Engineering Education and Outreach (CEEO) with secondary appointment in the Department of Computer Science within the School of Engineering at Tufts University. His research focuses on the design, implementation, and evaluation of different educational technologies, ranging from software and hardware to interfaces and environments.
Gillian Puttick, Ph.D., is a Senior Scientist at TERC. Her research focuses on designing, developing and testing inquiry-based curriculum, programs and activities for students and teachers that introduce fresh scientific discoveries to the classroom.
Fay Shaw, Ph.D., is currently a postdoctoral scholar at Tufts CEEO. Her research focuses on designing and incorporating educational technologies in formal and informal learning environments. Within this project, she has focused on artifact analysis.
Kristen Wendell, Ph.D., is an associate professor in mechanical engineering and education at Tufts University. Her research focuses on supporting productive and equitable classroom discourse in engineering learning experiences in K-12, undergraduate, and teacher education contexts.
References
Bernstein, D., Puttick, G., Wendell, K., Shaw, F., Danahy, E., & Cassidy, M. (in press). Designing Biomimetic Robots: Iterative Development of an Integrated Technology Design Curriculum. Educational Technology Research and Development.
Shaw, F., Kshirsagar, K., Wendell, K., Danahy, E., Bernstein, D., Puttick, G., & Cassidy, M. (2020). Characterizing student artifacts in a multi-disciplinary biomimicry and robotics unit. In Proceedings of FabLearn 2020.